| Time |
Reserve |
Set |
Clear
and
Release |
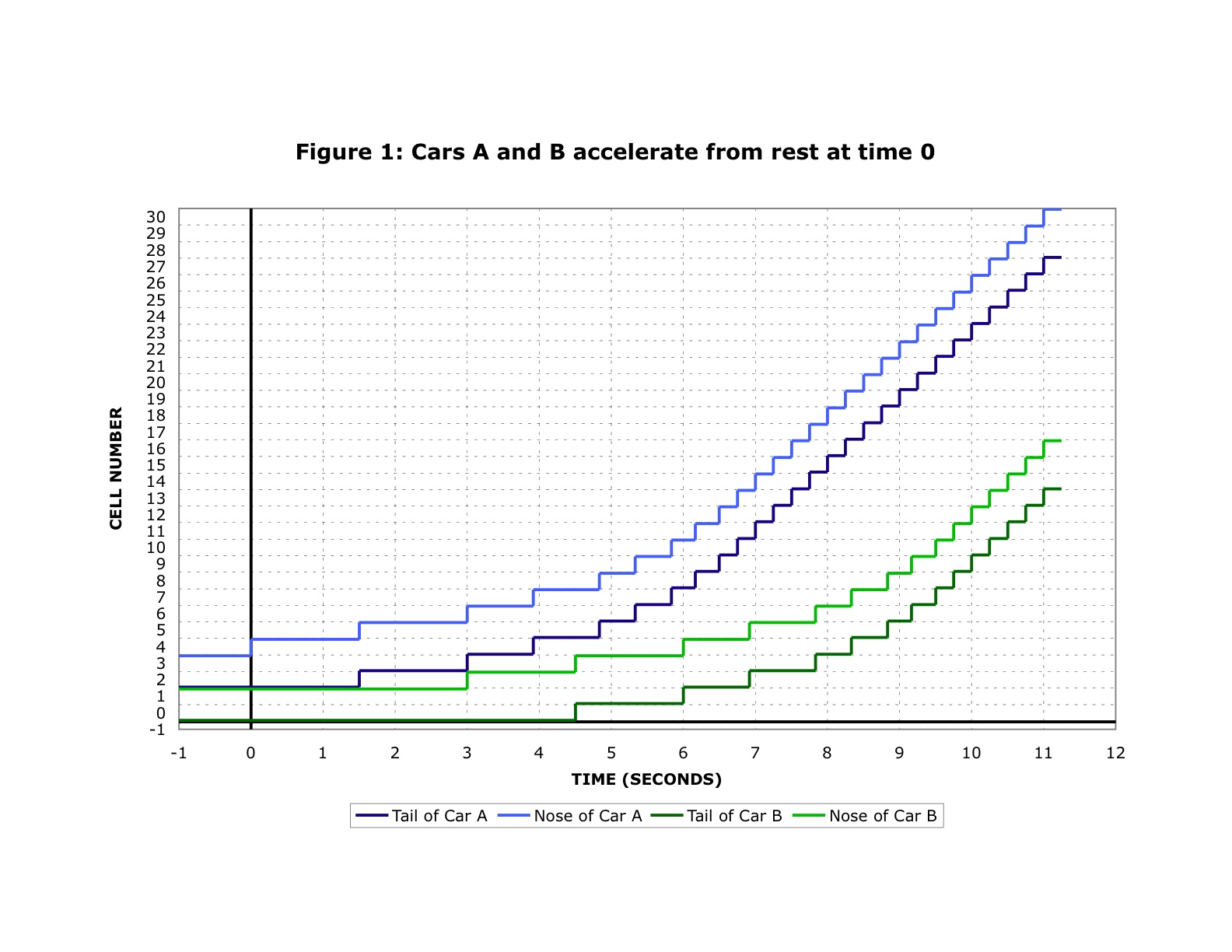
| 0 |
cell 4 |
cell 2:
speed=1, exit time=1.5 |
|
| 1.5 |
cell 5 |
cell 3:
speed=1, exit time=3 |
cell 2 |
| 3 |
cell 6 |
cell 4: speed=2, exit time=3+11/12 | cell 3 |
| 3+11/12 |
cell 7 |
cell 5: speed=2, exit time=4+5/6 | cell 4 |
| 4+5/6 | cell 8 |
cell 6: speed=3, exit time=5+1/3 | cell 5 |
| 5+1/3 | cell 9 |
cell 7: speed=3, exit time=5+5/6 | cell 6 |
| 5+5/6 | cell 10 |
cell 8: speed=4, exit time=6+1/6 | cell 7 |
| 6+1/6 | cell 11 |
cell 9: speed=4, exit time=6+1/2 | cell 8 |
| 6+1/2 | cell 12 |
cell 10: speed=5, exit time=6+3/4 | cell 9 |